CAPSTONE BLOG #2: 9/30/23
Our proposal is to build an affordable add-on that
decreases the effort and time required for a single armed individual to tie,
take out, and replace their trash. The goal of the solution is that, for an
single-armed amputee, the full process of tying, removing, and replacing a
trash bag takes a reduced amount of time compared to how it would with no
assistance.
Based on the goals mentioned, maintaining a maximum time
limit of 10 seconds and having a maximum trash load and securing force of 20
lbs will make the device more effective over manually tying the device.
However, this will be one of the main challenges for this project. Having an
optimized tying system that will meet these requirements is crucial for
success. Currently, the design is relying on a rotating tying mechanism where a
pole rotates up to 650 degrees and a hook that holds the bag to be able to go
up and down 4 inches to secure the knot. To ensure this device will be useful
for most single-arm amputees, the mounting portion of the device must be able
to expand between different size ranges for kitchen trash cans between 10-18
inches and attach onto the sides of a trash can using 2 clamps. Depending on
the material of the trashcan, the design of the mounting system must be able to
resist any slippage after installation. This may become a challenge as it
depends on the maximum trash load and strength of the clamps.
| Table 1: Constraints |
 |
In terms of the tying mechanism, there are two key challenges to
address. Since the overall goal of the tying mechanism is to “create a tight
knot in under 10 seconds”, the two challenges are the time constraint and the
creation of a “tight knot”. Completing a kinematic analysis to determine the
linear and angular displacements between one mechanic to another will give
insight to any potential optimizations required to meet the 10 second goal. The
kinematic data on the tying mechanism will be accompanied by the study and
application of knot theory. Analysis using knot theory will define both the
position of a “tight knot” in the bag, and the process of how the un-tied bag
reaches this position. Since the physical goal of the tying mechanism is to
create a knot, the knot theory analysis will provide the quantifiable
constraint as to whether the tying mechanism works or doesn’t. Figures 1 and 2 show information on knot theory and an example of kinematic analysis, respectively.
Another aspect in the tying mechanism design is considering the trash load limit of 20 pounds. To verify this limit, an isolated FEA on the hooks will be done to ensure the system used to tie the bag will not be interrupted.
The soft challenges identified by our team extend beyond the physical
aspects of the project, requiring thoughtful consideration in our design
approach. One significant challenge involves project documentation, where the
emphasis is on maintaining the accuracy and currency of information, such as
design requirements and technical analyses, throughout the duration of the
project. Another soft challenge in measuring the team’s success is clear
communication and constant feedback with clients and stakeholders. Establishing
and nurturing transparent channels of communication is vital for aligning our
design with their expectations. Additionally, we recognize the subjective
nature of the results, prompting us to engage in experiments with stakeholders.
This approach seeks to test the success rate of our device and collect measured
opinions from diverse perspectives. Success measurement is intricately tied to
the device's viability, a determination we aim to make through stakeholder
experiments, ensuring that the device effectively meets the expectations.
Furthermore, a soft challenge to be considered would be the expansion or
reduction of the scope of the project. With consistent feedback from both the
clients and stakeholders, the scope of the project will need to be adjusted
accordingly to meet expectations and deadlines as required.

| Figure 1: Basic Knot Theory Concepts |
 |
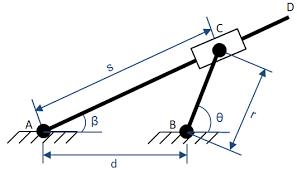 |
| Figure 2a and 2b: Examples of Kinematic Analysis |



Comments
Post a Comment