CAPSTONE BLOG #8: 4/13/24

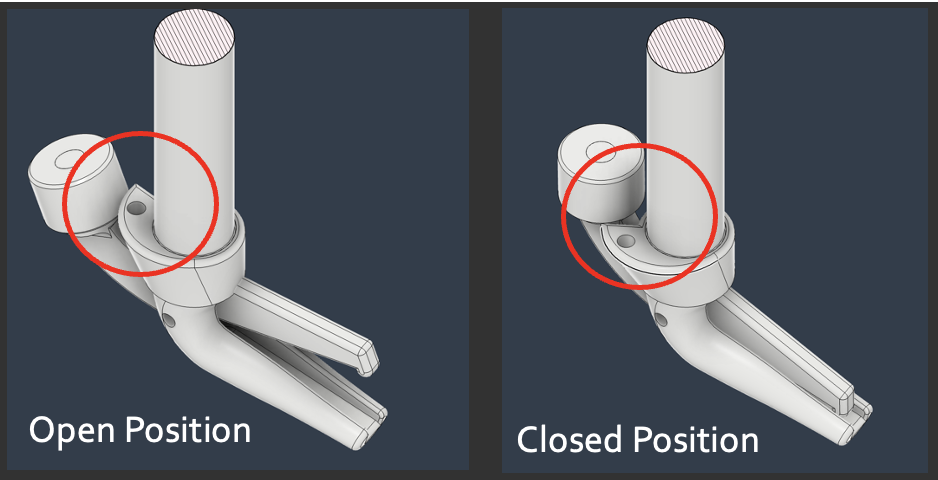
During the work period of March to April, the team made significant improvements by optimizing the clamp's performance. One way the team accomplished that was by increasing the size of the cam (located next to the white knob) to increase the clamp opening angle as shown in Figure 1. Furthermore, the team was able to conduct a validation test from which we'll share some key takeaways later on. Nevertheless, in this blog, the team will share updates made to the design and an optimized design was created based on the validation results. Proceedingly, the team will share the progress and major milestones that have been achieved so far. The following figure shows the updated cam design that was proposed in the previous blog. Since then, the team printed the physical version shown below and increased the opening angle from 12˚ to approximately 33˚ successfully. Figure 1: Initial Cam versus Final Cam Figure 2 shows the clamp at an open angle once it comes in contact w...